Human robot interaction
ROLE
UX Designer, Robotics Engineer
YEAR
2024
TLDR
Many emotional support robots (robots used for comfort and companionship) make use of cameras, microphones etc,. to collect data and respond to users. This can cause issues for a user's social, informational and psychological privacy. I designed Nandi, an emotional support robot that does not make use of any data collecting technology to provide meaningful interactions for users.
What
Nandi is a cow-adjacent robot designed for co-working spaces. It provides comfort by inviting users' to pet it as if it were a real cow, and responding to pets with gentle sounds and motion. The robot is placed in quiet zones, allowing simple and specific interactions.
Why
With many robots, because of their animal-like or human-like design, users become lenient with the information they share and the relationships they build with the robot. The false sense of trust and emotional connection to what is ultimately a machine can lead to unintentional interactions between the users and the robots.
How
Nandi reacts to touch – it can deliver sound and move around as a response to specific touches. It uses a MPR121 touch sensor to build a network of touch-points for the user to trigger a reaction with. The audio system runs through Pygame, letting Nandi play calming flute music in the background, adding to its peaceful environment. Every five minutes, Nandi "stretches" by gently moving to attract the attention of potential users, inviting them to engage and enjoy a moment of comfort.
And then?
Through several iterations of user testing in a co-working design studio, Nandi's physical appearance consistently captured users' attention. They were pleasantly surprised and amused when the robot moved in response to their touch. As a result, many returned to interact with Nandi again. After refining the design based on feedback, user satisfaction improved by 30%, demonstrating the positive impact of these changes on the overall user experience.
*RECORD SCRATCH*
HOW DID I GET THERE?
Robots can turn malicious
The motivation behind designing Nandi was to explore ways to create emotional connections without invading privacy, addressing the following concerns around informational, social, and psychological privacy.
Informational and Social Privacy
Robots that collect data to build responses to their users remain at risk of becoming "malicious" and share data (identifying data as well as social interactions) with unintended parties, either due to external influences (possibility of getting hacked) or bad data management policies.
Psychological Privacy
Most robots tend to be designed to be human-like or animal-like to enable more humane connections between humans and the robots. But this leads to robot's mimicking emotional connection where there isn't one, leading to excessive co-dependency and a tendedncy to form para-social relationships.
I surveyed existing research to understand emotional computing and the techniques being used for the same. I also interviewed two professors who had the chance to interact with a popular emotional support robot called Lovot in Japan to gain more insights on such robots.
Secondary Research
Many people argue that even after implementing various strategies, the primary responsibility of protecting social and psychological privacy lies in the hand of the users.
Humanizing (or zoomorphizing) robots is not inherently good or bad, but it does feed the emotion of these robots being more than just machines and capable of emotional thought and actions.
Primary Research
There were many reported cases of the Lovots becoming "attached" to a certain person based on repeating behavior patterns.
As people who work in the tech field, it is easier for us to remember that the robots are not capable of reciprocating the relationship we build with them fully. For people with less technical and scientific understanding, this distinction is hard to make.
How could the robot look?
My inspiration for the physical body of the robot came from other robots like Lovots and Eilik. Decisions about technical functionality could only be made based on what electronic components I had available in the prototyping lab.
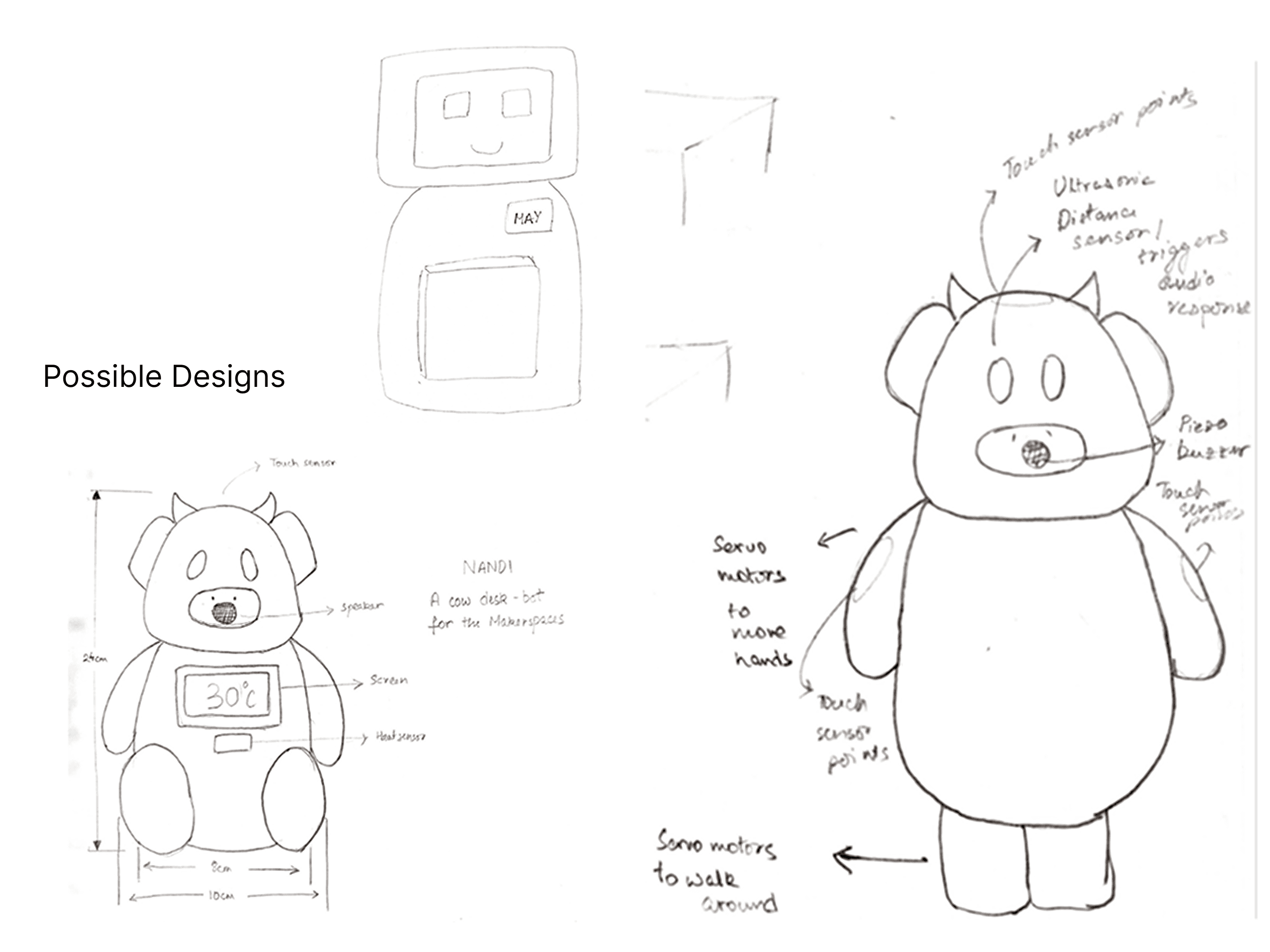
Image: Initial sketches of the robot
Early research led to the first version of Nandi, a stationary, teddy bear-like robot. Its features were unclear, with LED screens and heat sensors added without a clear purpose. Discussions with a shop engineer and peers helped define Nandi as a tactile emotional support robot. This led to the use of touch sensors and sound components, with some thought given to mobility.
A 3D modeled cow
I used Fusion360 for the first time to build the 3D model for Nandi. While the robot was designed to be stationary, I decided to model it as if it would have the capability to move, giving myself room for building on top of the existing version of it.

Image: 3D model of Nandi
Electronics Innards
An MPR121 touch sensor is connected to an Arduino through its I2C interface. The sensor’s GND connects to the Arduino’s GND, VDD to the 5V pin, and SCL and SDA to the A5 and A4 pins. A piezo buzzer is also connected, with one side attached to a digital pin (like pin 8) and the other to the ground. When someone touches the sensor, the buzzer plays a heartbeat sound, giving positive feedback to the user.

Image: Configuration of the touch-network
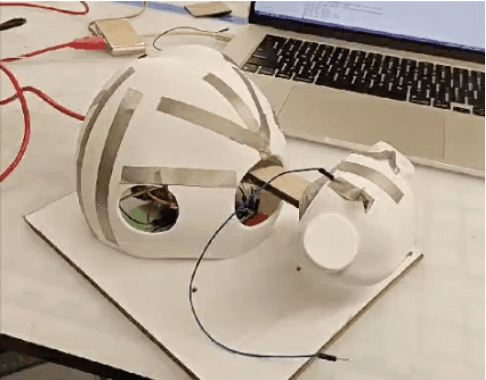
Image: Nandi with a motorized head
During one of the intermediate usability testing sessions, it was noticed that all three users couldn’t immediately identify Nandi as a cow. When probed, they said that making the robot stand on its hind legs was not very comforting, even if they could see the appeal of making it look like a teddy bear. So the robot was altered to be lying down.
To add some dimension to the now lying down robot, its head was attached to the servo motor that would react based on the touch sensor.
Say hi to Nandi!
Nandi is an “emotional support” robot designed to behave similar to an emotional support animal that could be housed in coworking spaces like community centers and studios. Its purpose is to offer emotional and social support to those who use such spaces, potentially alleviating stress by simple interactions.
Nandi reacts to touch – it can deliver sound and move around as a response to specific touches. The robot is placed in quiet zones, allowing simple and specific interactions. The interaction is intentionally simple and private – the aim is to understand methods to provide emotional support technology that is not invasive.

Image: Nandi, in all its glory
Video: Watch Nanddi!
What everyone said
During field testing, Nandi was set outside in open space in a co-working space. The background music attracted people towards Nandi, who later reported that the physical appearance also attracted them towards it. When they reached out to touch it, they were surprised and amused at its movement and sound, and continued to touch it for a while. Three people came back to pet it after some time as well.

Image: People interacting with Nandi
Reflections
The primary goal of Nandi was to understand how emotional support can be provided by using simple, non-invasive interactions. By avoiding features like facial recognition or intrusive monitoring, I was able to ensure a safe and respectful experience. I also had the opportunity to explore subtle design choices that could significantly influence user comfort for those who use Nandi.
This project strengthened my user research and usability testing skills, as I conducted multiple rounds of testing to refine the robot.